
2022 - 2025
SHARA3: Holistic Care System based on Affective and proactive Robots for Older Adults.
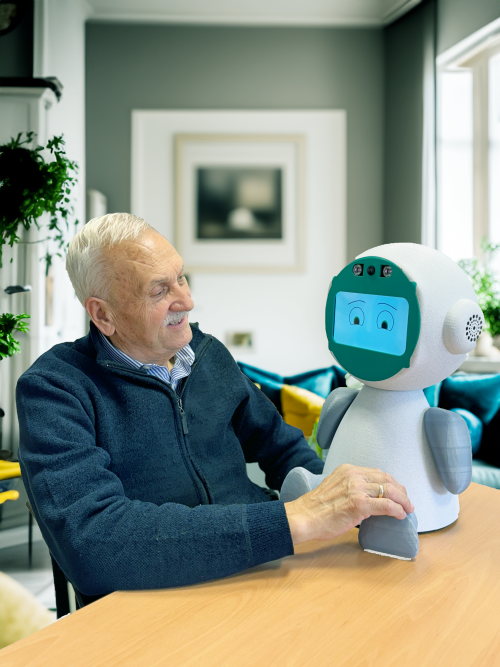
This project aims, from an applied research perspective, to contribute to the improvement of the quality of life of older adults at home through assistants based on proactive and affective robotic platforms, and the study of their intervention for autonomous decision making, and by specialists, according to the needs of the user and their environment. This way we follow a holistic approach, where the assistance to older adults can be seen as a whole, and not as a union of isolated assistive functionalities.

Overview
Main Objective:
To contribute to the improvement of the quality of life of elderly people at home, through assistants based on proactive and affective robotic platforms, and their intervention for decision making according to the user’s needs and behaviours.
To satisfy the proposed objective and go more in depth in its study, we also describe several technological innovations that are potentially transferrable such as: (1) the development of a platform for the co- creation of assistive systems by therapists and specialists, (2) the development of middleware for the confection of a full robotic platform following a Robot as a Platform approach, (3) the development of a tool that will facilitate the analysis of the behaviour and affect based on human-robot interaction for the therapists’ decision making, and (4) the integration of a learning motor for the autonomous intervention of the system.

Work Packages
Coordination, Management and Dissemination
Transversal aspects of the project. Ethical and privacy implications.
User Modelling and Proactive Behaviour
Context model generation and robot interactions and behaviour
Development
Design and implementation of an infrastructure of adapted services
Integration
Integration of an open source robotics platform with AVA Composer and AVA Cloud
Validation and knowledge extraction
Analysis of social and affective human-robot interaction
Research Team






Dr. Ramón Hervás

Dr. Jesús Fontecha
- José Bravo (UCLM, Computing Engineer)
- Javier Navarro (UCLM, Geriatrician)
- Iván González (UCLM, Computing Engineer)
- Tania Mondéjar (UCLM, Psychologist)
- Esperanza Johnson (UCLM, Computing Engineer)
- Luis Cabañero (UCLM, Computing Engineer)
- Alejandro Pérez-Vereda (UCLM, Computing Engineer)
- Dagoberto Cruz-Sandoval (DCS, USA)
- Jesús Favela (CICESE, Mexico)
- Macarena Espinilla (UJA, Spain)
Results
Journal Publication

Evaluating proactivity levels in socially assistive robots for elderly care: a user adoption assessment
by Laura Villa, Ramón Hervás, Luis Cabañero, Jesús Fontecha, Gustavo López, Jesús Favela
Behaviour & Information Technology 2025.
This study evaluates different levels of proactivity in socially assistive robots (SARs) within elderly care, focussing on user acceptance and comfort. Using the mPLiCA model, we categorise proactive behaviours from basic presence to full autonomy. A series of video scenarios was created to represent varying degrees of proactive interactions with SHARA, a socially assistive robot. Participants rated these scenarios based on usefulness, appropriateness, perceived intrusiveness and naturalness. Results indicate that higher levels of proactivity are perceived as more useful but also more intrusive. Intermediate levels, particularly dialogue-based interactions, were the most acceptable. This research offers insights into designing SARs that balance autonomy and user comfort in elderly care, contributing to the development of more effective assistive technologies.
Journal Publication

Comparative Analysis of Generic and Fine-Tuned Large Language Models for Conversational Agent Systems
by Laura Villa, David Carneros-Prado, Cosmin C Dobrescu, Adrián Sánchez-Miguel, Guillermo Cubero, Ramón Hervás
Robotics 2024, 13(5), 68.
In the rapidly evolving domain of conversational agents, the integration of Large Language Models (LLMs) into Chatbot Development Platforms (CDPs) is a significant innovation. This study compares the efficacy of employing generic and fine-tuned GPT-3.5-turbo models for designing dialog flows, focusing on the intent and entity recognition crucial for dynamic conversational interactions. Two distinct approaches are introduced: a generic GPT-based system (G-GPT) leveraging the pre-trained model with complex prompts for intent and entity detection, and a fine-tuned GPT-based system (FT-GPT) employing customized models for enhanced specificity and efficiency. The evaluation encompassed the systems’ ability to accurately classify intents and recognize named entities, contrasting their adaptability, operational efficiency, and customization capabilities. The results revealed that, while the G-GPT system offers ease of deployment and versatility across various contexts, the FT-GPT system demonstrates superior precision, efficiency, and customization, although it requires initial training and dataset preparation. This research highlights the versatility of LLMs in enriching conversational features for talking assistants, from social robots to interactive chatbots. By tailoring these advanced models, the fluidity and responsiveness of conversational agents can be enhanced, making them more adaptable and effective in a variety of settings, from customer service to interactive learning environments.
International Conference
Conversational Agent Development Through Large Language Models: Approach with GPT
by Laura Villa, David Carneros-Prado, Adrián Sánchez-Miguel, Cosmin C Dobrescu, Ramón Hervás
International Conference on Ubiquitous Computing and Ambient Intelligence, 286-297 (Springer) 2023
This study investigates the potential of a Large Language Model (LLM) as a Chatbot Development Platform (CDP) for designing dialog systems in the context of conversational agents. While traditional systems often combine rule-based and machine learning approaches via third-party platforms for dialog design, this research explored the utilization of GPT for this purpose, especially for intent and entity detection integral to CDPs. Through a fine-tuning process, two GPT models were adapted to enhance their performance in these tasks, resulting in time and resource efficiency. The resultant system offers a flexible and adaptable framework for chatbot design, with fine-tuning showing significant benefits in maintaining output consistency and saving GPT tokens. The intent classifier demonstrated high precision (99.056%). However, the system faced challenges with dynamic entities, such as dates, due to GPT’s inability to access real-time data. Despite this, the study highlighted the immense potential of GPT and similar LLMs in developing conversational agents while drawing attention to the challenges of handling dynamic entities. These findings signal opportunities for innovative fine-tuning and system integration strategies, encouraging continued research in the dynamic field of conversational AI.
International Conference
Proactivity in Conversational Assistants: The mPLiCA Model Based on a Systematic Literature Review
by Esperanza Johnson, Laura Villa, Tania Mondéjar, Ramón Hervás
International Conference on Ubiquitous Computing and Ambient Intelligence, 286-297 (Springer) 2023
In the last years, we have seen a rise in the use of assistants that are becoming more and more natural in their interactions with people. An emerging characteristic is the proactivity in the assistant interaction. The areas of use for these types of assistants range from health, education, to general assistance for tasks, among others., and the proactivity is usually a means to an end, usually to improve user engagement. Given the growing popularity, we have taken the opportunity in this paper to perform a systematic literature review which focuses on agents with a primary focus on them being proactive. During this, we have observed several interesting patterns, such as the main form of interaction for these agents is through verbal interaction, or the fact that they are usually robots. Many of these papers study user response and feelings to different levels of proactivity, with some defining a time-based proactive response, and other focusing on user involvement when defining proactivity levels. All these findings regarding proactivity make it possible to propose, a model based on the proactivity level and the agent’s ability to learn from each interaction, which is what we are presenting in this paper.
International Conference
Incorporating Affective Proactive Behavior to a Social Companion Robot for Community Dwelling Older Adults
by Laura Villa, Ramón Hervás, Cosmin C Dobrescu, Dagoberto Cruz-Sandoval, Jesús Favela
International Conference on Human-Computer Interaction, 568-575 (Springer) 2022
Virtual assistants, agents and social robots are becoming increasingly popular, assisting users in simple daily tasks. However, they are often mere voice-based interfaces to internet. In fact, they can be perceived as unnatural, unreliable and “inhuman” or distant, as they cannot support a fluid conversation and are not empathic. EVA is a socially assistive robot, created as an open platform, being extended by several research groups. It is an open source, modular, low-cost and conversational robot aimed at supporting Instrumental Activities of Daily Living (IADLs). We describe how interaction with this robot can be improved by incorporating proactivity, so that EVA is able to initiate conversations and care about the user, making the interaction more natural, social and affective. The two main steps to achieve this interaction are: a) with specific triggered events, EVA asks different proactive questions, when the user’s presence is detected and b) introducing the novel wakeface method, a more natural alternative to the traditional wakeword. With the proposed approach, the robot gets activates when looked at in its eyes. This ensures eye contact during the conversation, a common non-verbal communication strategy among humans, improving affects and trustworthiness. In this paper, the main functionalities of proactive EVA are described.
International Conference

Design and Evaluation of Proactive Behavior in Conversational Assistants: Approach with the Eva Companion Robot
by Laura Villa, Ramón Hervás, Dagoberto Cruz-Sandoval, Jesús Favela
The importance of providing emotional support and assistance to older adults has been highlighted by the COVID-19 pandemic. An increasing number of older adults live alone, which promotes loneliness and depression risks. Also, the digital divide exacerbates these issues and other social difficulties, since older adults are not able to use technology to communicate. A socially assistive robot could help to address these loneliness and digital divide problems. However, it is critical to incorporate affectiveness and naturalness to promote the user acceptance of the robot. This project makes use of the existing EVA open-source robotics platform. The aim is to improve the quality of life of older adults by boosting their independence and alleviating loneliness or other emotional issues that can arise. To improve the user acceptance and to get a more natural, affective, non-passive behavior, this paper contributes to integrate several aspects to the EVA robot: a) assistiveness through conversations and a social messaging end-user skill to reduce the digital divide; b) proactivity by means of proactive interventions so EVA is able to start conversations; c) affectivity by means of showing emotions with eyes expressions, user recognition and emotion analysis in user input; and d) naturalness by blending all these characteristics with a low response time in the interaction and the novel wakeface activation method. Finally, a technical evaluation of the proposed solution provides evidence of its appropriate performance.